Форум сайта «Автоэлектрик для всех» -> Кан шина Киа Рио New

Для того чтоб управлять одним реле нам нужен один провод, для того чтоб управлять ю реле, двадцать проводов, далее ситуация нужно улучшить систему и кан шина киа рио еще 5 реле, еще 5 проводов. КАН позволяет 2-м устройствам общаться с помощью пакетов, замена одного устройства на другое не повлечет за собой изменения канала связи, просто замена блока.
Что и исполюзуют на сегодняшний день производители авто.

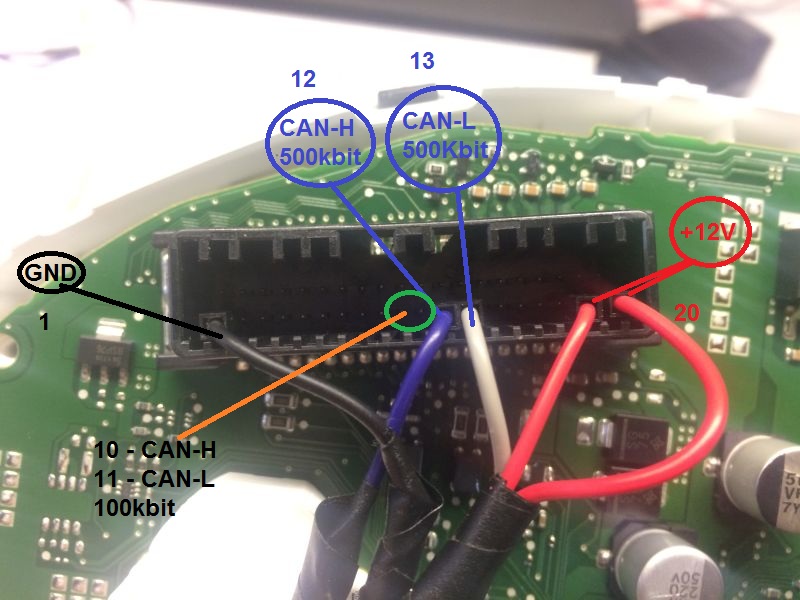
КИА не самый каноразвитый авто, но и тут, в моей версии уже довольно все интерестно. В моей UB, 2 шины разной скорости, шина С со скоростьюи шина B со скоростью шины от разных устройств коммутируются в салонном блоке предохранителей, левый верхний боковой разъем. Я подключался к кан-шине с помощью контроллера Arduino. Объём данных в одном сообщении по шине данных CAN составляет 8 байт. Блок-приёмник обрабатывает только те кан шина киа рио пакеты данных кан шина киа рио, которые сохранены в его списке принимаемых по шине данных CAN сообщений контроль приемлемости.

Пакеты данных могут передаваться только в том случае, если шина данных CAN свободна.
KIA Rio 2017 CAN шина
Если несколько блоков управления одновременно начинают передавать сообщения, то вступает в силу принцип приоритетности, кан шина киа рио которому сообщение по шине данных CAN с наивысшим приоритетом будет передаваться первым без потери времени или битов арбитраж запросов доступа к общей шине данных. Каждый блок управления, утрачивающий право кан шина киа рио, автоматически переключается на приём и повторяет попытку отправить своё сообщение, как только шина данных CAN снова освободится.

Кроме кан шина киа рио данных существует также пакет запроса определённого сообщения по шине данных CAN. В этом случае блок управления, который может предоставить запрашиваемый пакет данных, реагирует на данный запрос. Формат пакета данных В обычном режиме передачи пакеты данных имеют следующие конфигурации блоков фреймы: Протокол шины данных CAN поддерживает два различных формата фреймов сообщения по шине данных CAN, которые различаются только по длине идентификатора: Пакет данных для передачи сообщений по шине данных CAN состоит из семи последовательных полей: Маркирует начало сообщения и синхронизирует все модули.
Это поле состоит из идентификатора адреса в 11 бит и 1 контрольного бита Remote Transmission Request-Bit.
Этот контрольный бит маркирует пакет как Data Frame фрейм сообщения или как Remote Frame фрейм запроса без байтов данных. Поле управления 6 бит содержит IDE-бит Identifier Extension Bit для распознавания кан шина киа рио и расширенного формата, резервный бит для последующих расширений и — в последних 4 битах — количество байтов данных, заложенных в Data Field поле данных.
Поле данных может содержать от 0 до 8 байт данных.

Сообщение по шине данных CAN длиной 0 байт используется для синхронизации распределённых процессов. Маркирует конец пакета данных. Интервал между двумя пакетами данных. Интервал должен составлять не менее 3 битов.
После этого любой блок управления может передавать следующий пакет данных. Если ни один блок управления не передаёт сообщений, то шина CAN остаётся в режиме покоя до передачи следующего пакета данных.

Приоритеты Для обработки данных в режиме реального времени должна быть обеспечена возможность их быстрой передачи. Это кан шина киа рио не только наличие линии с высокой физической скоростью передачи данных, но и требует также оперативного предоставления доступа к общей шине CAN, если нескольким блокам управления необходимо одновременно передать сообщения.
С целью разграничения передаваемых по шине данных CAN сообщений по степени кан шина киа рио, для отдельных сообщений предусмотрены различные приоритеты. Угол опережения зажигания, например, имеет высший приоритет, значения пробуксовки — средний, а температура наружного воздуха — низший приоритет. Приоритет, с которым сообщение передаётся по шине CAN, определяется идентификатором адресом соответствующего сообщения.

Идентификатор, соответствующий меньшему двоичному числу, имеет более высокий приоритет, и наоборот. Протокол шины данных CAN основывается на двух логических состояниях: Если доминантный бит передаётся как минимум одним модулем, то рецессивные биты, передаваемые другими модулями, перезаписываются. При передаче поля идентификатора блок-передатчик после каждого кан шина киа рио проверяет, обладает ли он ещё правом передачи, или уже другой блок управления передаёт по шине данных CAN сообщение с более высоким приоритетом.
Если передаваемый первым блоком-передатчиком рецессивный бит перезаписывается доминантным битом другого блока-передатчика, то первый блок-передатчик теряет своё право передачи арбитраж и становится блоком-приёмником. Первый блок управления N I утрачивает арбитраж с 3-го бита. Третий блок управления N III утрачивает арбитраж с кан шина киа рио бита. Другие блоки управления попытаются передать свои сообщения по шине данных CAN только после того, как она снова освободится.

При этом право передачи опять будет предоставляться в соответствии с приоритетностью сообщения по шине данных CAN. Распознавание ошибок Помехи могут приводить к ошибкам в передаче данных.
KIA RIO QBR лечим проблему с CAN шиной
Такие, возникающие при передаче, ошибки следует распознавать и устранять. Протокол шины данных CAN различает два уровня распознавания ошибок: Блок-приёмник заново вычисляет эти контрольные биты кан шина киа рио основе принятого по шине данных CAN сообщения и сравнивает их с контрольными битами, полученными вместе с этим сообщением.

Frame Check: Этот механизм проверяет структуру передаваемого блока фреймато есть перепроверяются битовые поля с заданным фиксированным форматом и длина фрейма. Распознанные функцией Frame Check ошибки маркируются как ошибки формата. Механизмы на уровне битов Мониторинг:
KIA Rio 2017 CAN шина


Выдалось время немного поработать со свеженькой панелью приборов от KIA Rio 2017 года выпуска.
Задачу перед собой поставили такую: Изучить какая информация и каким образом передается в CAN шине KIA свежих годов выпуска. Отмечу что такая же панель стоит и на новых Hyundai Solaris.

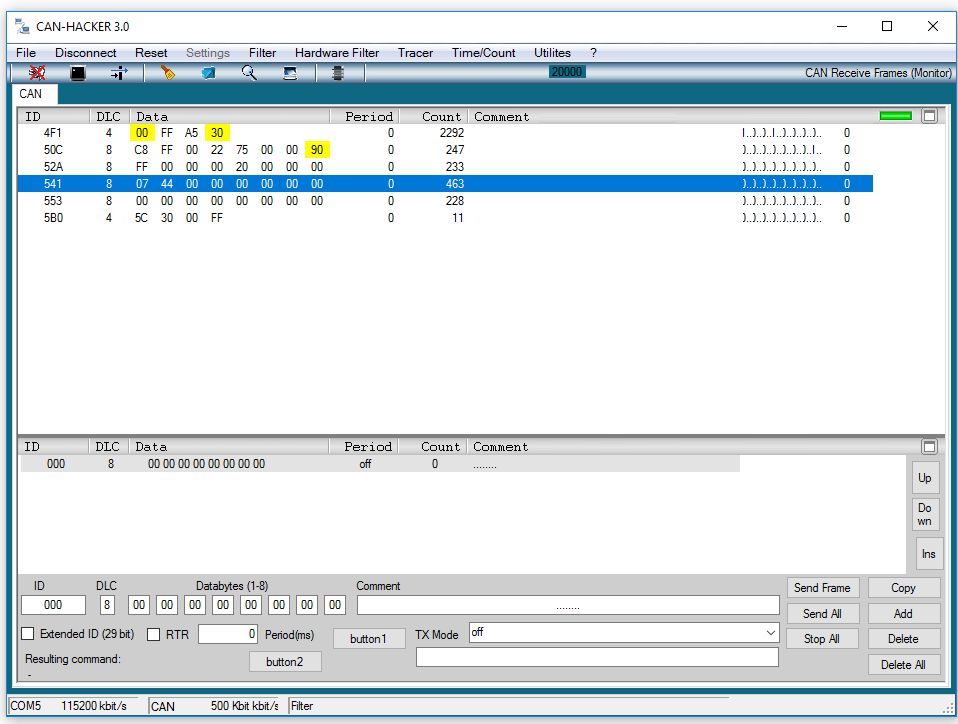
В качестве анализатора CAN шины использовали CAN-Hacker3.0 подключенный к быстрой шине C-CAN на скорости 500кбит\с
Вот что панель отдает при подключении на столе:

Кстати, на скриншоте интерфейс нашего нового софта, который мы готовим в релиз.
Итак, чего же интересного удалось вытащить из CAN шины.
1. Обороты двигателя
Все как и на более старых KIA\HYUNDAI
ID=0x316
DATA: 00 00 00 10 00 00 00 00, где
0x10=1000rpm 0x20=2000rpm 0x30=3000rpm
Скорость автомобиля в км\ч
ID=0x52A
DATA: 4A 00 00 00 00 00 00 00, где
0x4A = 74 км\ч, а если будет 0x90 то скорость =144км\ч то есть просто переводим из HEX в DEC
Положение селектора АКПП
ID=0x111
DATA: 00 55(Gear) 00 00 00 00 00 00, где
0x00 -P; 0x04,0x05 -D; 0x06 -N; 0x07 -R.
На автомобиле значения могу отличаться, поскольку за ту или иную передачу отвечает определенный бит в байте, я с этим не разбирался ибо машины у меня не было.
Ну и напоследок
Текущий пробег
ID=5B0 DLC=4
DATA: 26 2F 00 FF, где 262F-DEC = пробег*10
Помимо описанных пакетов есть еще много других в которых передается информация об индикаторах ABS, TRC, TPMS, ручника, открытого\закрытого багажника, расстояния до заправки, а так же (!) уровень текущей яркости подсветки выставленной кнопками. Но это как правило мало кому интересно.
А вот уровень топлива просто так не увидеть, придется совершить танец с бубном, потому что сигнал с датчика уровня топлива заходит в панель по старинке — напрямую.
Ранее мне доводилось работать с панелью приборов от KIA Sportage так же года 2016.2017 с панелью приборов YAZAKI

Добавить комментарий Отменить ответ
Для отправки комментария вам необходимо авторизоваться.